1。简介ADA4571是一种各向异性磁磁倍率(AMR)传感器,其中包括信号调理放大器和ADC驱动器。广告
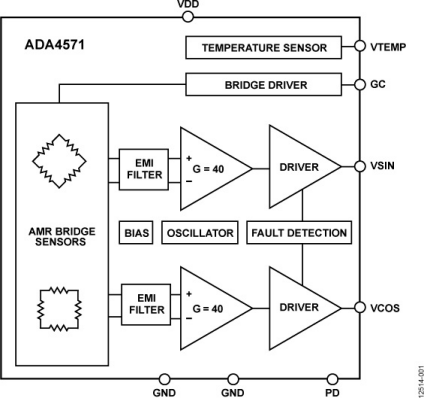 1。简介ADA4571是一种各向异性磁磁倍率(AMR)传感器,其中包括信号调理放大器和ADC驱动器。 ADA4571生成两个模拟输出,指示周围磁场的角度位置。 ADA4571包括一个包装中的两个芯片,尤其是AMR传感器和固定增益(名义G = 40)仪器放大器。 ADA4571在旋转磁场的角度提供了清洁且增强的余弦输出信号和正弦。输出电压的范围与电源电压成正比。传感器以45°角包含两个小麦桥。 X-Y传感器平面上的旋转磁场提供了两个正弦输出的脱位信号,并且传感器的角度(α)频率和磁场的方向加倍。在X-Y平面的均匀磁场中,输出信号与Z方向的物理位置(气隙)无关。 ADA4571有8针SOIC包装。产品功能1。测量非接触角度的角度。 2。测量磁场的方向而不是农场的密度。 3。对气隙变化的敏感性非常小。 4。工作距离很长。 5。即使弱饱和场也具有很高的精度。 6。热漂移和生命漂移非常小。 7。滞后可能被忽略。 8。单芯片解决方案。 2。成本增加并增加了客户对小型产品(例如其他工程领域)的需求,成本迅速成为强迫弹药系统。为了有效地驱动和控制飞行中的这些弹药,由小型控制驱动系统(CAS)进行了较小的精度调整,以确定鳍的位置并调整到弹丸的气流。传统上,这些系统是由带有变速箱的拉丝直流电动机驱动或驱动的,但是现代前进的电动机驱动器在内R,便宜,更好的控制驱动系统。但是成本是增加系统的复杂性,因为无刷直流电动机的三个阶段是驱动的。增加复杂性的原因很多。首先,传统的拉丝直流电动机仅需要H桥,而没有直流电动机的那些则需要三个独立的MOSFET才能驱动相位。这增加了成本很小的成本,需要额外的PCB板空间。当将这些MOSFET驱动时,重要的是要小心避免同时打开顶部和底部MOSFET,否则通过短路电流可能会损坏MOSFET。应特别注意手腕宽度(PWM)的顶部和底部驱动器信号之间的死时间。从软件的角度来看,可以使用简单的PID循环来控制传统的拉丝电机,而刷子直流电动机需要更先进的循环和相位换向的方法 - 标准测量周期的电流 - 旋转电流,相电压,转子角度和速度。刷子直流电动机的结构无直流电动机的刷子是定子中的电磁体集合,并且在可旋转的转子上安装了永久磁铁。电动机可以是转子的内部电动机(磁铁在线圈内部不满)或外圈电动机(磁铁位于线圈外)。图1显示了转子电动机的刷子dcang和电动机上使用的外电动机转子。在这两种情况下,三相线(U,V,W或A,B,C)在定子牙齿周围缠绕。这些绕组被加强以吸引和排斥永久磁铁(红色/蓝色)。图1。内转子电动机和外转子电动机。标准微处理器或DSP的当前驾驶强度不足以直接直接驱动线圈,因此,由MOSFET组成的电源逆变器阶段通常用于将PWM驱动电流从控制接口转换为需要高电压电流的电动机。通常,三相逆变器使用六个N通道MOSFET(请参见图2的顶部)来形成图2所示的开关状态。在图:001、010、011和101。1中没有显示许多移动状态。如图3所示,在状态空间的表示中,这些状态被刺穿。通过剃须和开关,施加到旋转的六个扇区可以达到2/3×VDC。作为这种方法的自然扩展,可以将PWM应用于每对MOSFET。通过更改PWM占空比周期的循环,根据PWM生成系统的分辨率,圆形转基上产生的电压可以产生大量的电压。图2。三相逆变器和开关状态。图3。表示向状态空间及其在PSECTOR I和部门VI中的分布。在没有PWM的情况下,一种非常自然的换向方法就是简单地刺激每对绕组或六步的换向)。在这种方法中,获得一个或两个阶段的高度,其余旋转驱动较低。通过随后启用相位,在每个阶段都会拉动转子磁体,转子开始旋转。为了确定激发的相位,通常将三个霍尔效应传感器安装在定子上,三个60度与电角分开。该大厅效应的传感器检测每个转子磁体并制作一个3位数的顺序,用于确定下一个换向区域。尽管这种方法适用于低电动机控制系统,但它受扭矩脉动tolow速度的影响。此外,如果电动机用于定位/伺服应用,则这种扭矩脉动会导致噪声并导致位置误差。 1正弦相的工作原理是在没有直流电动刷上的定子通量与当前的定子对齐。无刷直流电动机基于当前的梯形运动。这些波浪不同by彼此之间的120°相。永久磁铁同步电动机(PMSM)与没有直流电动刷的磁体同步电动机相似,但需要正弦电流驱动器。图4显示了永久磁铁重合电动机的功能框图。通过使用速度传感器或基于位置轴传感器和电动机参数的估算值来实现简单的速度控制。 Moviewave驱动器在低速下特别有效,但在高速下分开,因为所需的电影波的功率频率也应以速度增加。在较高的速度下,电动机需要增加扭矩,这将滞后到当前阶段。 2要正确控制更高速度,通常必须引入相位导线以正确对齐扭矩和磁通量。图4。磁同步电动机的Yongsine驱动器。为了克服这个问题,可以使用更先进的控制方案称为磁场方向控制(FOC)。与其他换向技术一样,基于ES旋转产生的后电气电动力的安静位置和速度,无需使用传感器即可实现磁场方向控制,并且也可以使用传感器溶液实现位置和电流MGA传感器。控制磁场方向的控制基础是控制进入旋转电动机的扭矩和通量矢量。形成的向量来自所需的运动速度。利用电动机的电气和机械常数(惯性矩,摩擦系数,电感和定子电阻来控制摩托车,必须将这些数量转换为转子参考(图6)以在公园内发生变化,以生成Vα和Vβ。将Vα和Vβ转换为PWM值转换为PWM值转换为PWM值,将pWM值转换为pWM的磁场控制,图6个位置控制。参数。如图3所示,可以形成速度矢量。相邻细胞向量之间的空间已被抓住,以在1到6之间产生对应于换向循环行业的六个扇区的扇区。图7显示了图3中第一个扇区的近距离图7显示,可以通过使用两个相邻的细胞向量(V1和V2)找到VREF,并在每个状态停留一定时间(对应于占空比)。可以使用类似的矢量数学方法(派生方程)来计算此占空比(见图8)。图7。状态空间的扇区1。 u,v,w矢量方程计算图8。根据图7中的方程式从参考矢量的扇区时间,认为归一化时间为1.0(相当于整个100%值班周期),并减少TN和TN + 1,您可以得到PWM时间。该扇区可以通过其他计算确定,如图9所示。图9。该扇区的测定。计算占空比并发送到PWM'时可以使用磁场方向实现S PWM模块,开环控制。应包括反馈以实现闭环控制。如图4所示,使用公园的相对公园对三个圆周循环的电流进行测量和修改。为了测量这些波,可以使用许多不同的技术:平行于每个相旋转的分流检测;三个MOSFET和土壤的Ilalim之间的低端分流;每个地面MOSFET下的相位分流;或每个领先MOSFET和VDC之间的高压边缘。如果设计仅限于成本,则与绕组并行使用两个分流是一个很好的方法,因为这是一种直接测量两个绕组电流的简便方法。可以计算出第三电流用于Kielang Current Hough定律,该定律是整体是0。另一个好处是可以随时测量电流,而不是启用底部或顶部MOSFET。测量这些波之后,它们必须是使用分流系统的最大电流在[-1,+1]中归一化。对于发现的位置和速度,可以使用编码器(相对或完全),可以使用霍尔效应传感器,旋转器或磁角传感器。根据传感器的分辨率,可能需要其他位置和估计速度。无论使用哪种技术,测得的角度都必须转换为电位角度,以便相位换向与实际转子位置同步,并实现转子变化。角速度也应是已知的,但是该术语通常位于机械域中以匹配所需的输入速度。如果已知转子的实际位置和速度,则可以执行反向/反向公园和CLARKE变换,以将相位电流从固定的定子坐标系转换为旋转坐标系转换为d,q参考系统。对于生成的电流和误差速度tERMS,PI循环会生成错误向量,然后将其馈回Pagesthe Park,Clarke将会改变,并且可以反复进行控制过程。那么该过程应该重复多快呢?答案根据电动机的特性而不同。通常,选择听觉可听见范围(15 kHz至30 kHz)以外的PWM频率,以使电动机不会在人耳中释放可听到的共振。然后在中断的PWM工作中实现磁场方向控制和所需的控制回路,以便可以将新的PWM值用于下一个PWM循环。它对在现场控制的例程中施加了严格的正时限制,因为在伺服PWM中断上花费的任何时间都不用于伺服控制处理器的其他方面(例如PC程序串行接口)。在30 kHz的PWM频率下,每个PWM ISR仅为33.3 μs。可以看出,每个微秒的智慧都很重要!应该注意的是,电影的计算开销余弦和其他浮点计算应减少。通常,最好将现场控制方向定向定向在PWM ISR时间的50%以下,以便处理器可以交付其他外围设备(例如UART),以处理诸如更改所需速度或设置新位置之类的较少重要任务。选定的组件规定,控制取向控制本身的实现本身是复杂的,仔细选择组件可以帮助减少额外的系统集成挑战。 ADI提供了各种用于电机控制信号链的设备。这些组件包括栅极驱动器,全角和霍尔效应传感器,电流传感器和分离产品。 ANG在图10中显示了链链链组件的简单功能框图。在高水平下,使用ADA4571 AMR角度传感器和AD22151磁场传感器,无需刷刷直流电动机轴的位置和速度。相绕组电流测量USINg内联排出电阻,AD8418当前定义放大器卸下PWM标准电压模式。 LTC2345-18 8×18位ADC将6个模拟电压从传感器转移到微控制器数字电压。微控制器使用这些信号来计算PWM占空比并将其发送到硬件计时器。 LT1158 MOSFET驾驶员充当了六个电源逆变器MOSFET的门驾驶员。图10。链链信号链的功能框图。 LT1158是N渠道MOSFET的一体式半身驱动器。尽管电源电压范围为5至30 V DC,但PWM波形逻辑输入可以适应TTL或CMOS水平。此外,单个PWM输入被转换为高和低MOSFET驱动信号,芯片自动结合了死者的自适应时间。这意味着PWM频率可能会严格地改变 - 无需输入,以保护MOSFET免受当前破坏而无需更改PWM计时器代码或重新计算戒指。图11。LT1158双N通道MOSFET驱动器。 ADA4571集成的各向异性磁扰(AMR)传感器可以测量180°并测量0.5°之内的精度。传感器的电源电压为2.7 V至5 V,当启用温度补偿时,电力消耗仅为7 mA。传感器的输出是正弦波(VSIN,VCO)的两个类似物,以2.5 V(5 V电源)为中心。在VSIN和VCO的电压被二定化之后,它们可以通过简单公式将其转换为角度:图12。ADA4571AMR传感器。为了测量360°的完整旋转,ADA4571可以与线性输出磁场(HALL效应)传感器(例如AD22151)一起使用。 AD22151专为单个5V操作电源而设计,其输出电压与垂直于包装的磁场的线性比例。在正常操作期间,该设备的最大强度为10 mA,可以发现双极或单极磁场不同的收益。该传感器的优点可以在模拟输出电压上看到,并且很容易添加到已经具有模拟测量功能的系统中,例如当前传感器输出或其他模拟角度传感器。将AD22151与AOF ADA4571一起垂直放置,并可以通过软件组合输出,以检测360°轴轴仪的磁铁直径。像一个角度传感器一样,使用传感器的磁场方向控制需要通过无直接运动刷来测量相电流的准确相位。 AD8418是双向零饮用电流放大器,非常适合此任务。在整个温度范围内工作时,该外电流放大器的益处为20 v/v,并且标准范围为-2 V至+70V。放大器还可以通过分流器看到双向电流,当测量刷子DC电动机的相位电流时,这特别有用。该设备具有设计的VS电源电压范围2.7 V至5 V,以模拟输出电压为中心在VS/2上。如果选择了5 V电源,则输出为2.5 V,与ADA4571相同。图13。AD8418电流传感器。使用模拟输出传感器时,应将结果转换为数字域。尽管有许多ADC,但由于8个同时采样通道,LTC2345特别适合运动控制。采样将其转换为同步,并带有单个上升的边缘到转换线。然后,在中心对齐PWM期间,可以同时同步传感器传感器的相电流和全角。单个5V电源简化了电源设计,并且仍然不到20mA。数字逻辑输出的独立电压为LTC2345接口提供了较低的电压微控制器,处理器或FPGA。由于模拟输入范围是NAPCAN适应,因此可以使用(IN-)模拟INP自动从硬件中删除2.5 V偏移位置和电流传感器UT频道。根据所需的采样吞吐量,可以使用SDO输出以不同的时钟速率从LTC2345输出数据。图14。LTC2345功能框图。结论刷摩托车在控制驱动系统上的普及需要更高级的算法,传感器和驱动电路才能支撑。正弦和磁场控制是两种相位换向技术,可以在没有直流电动机的情况下准确控制刷子。两种技术都需要精确测量刷直流电动机的转子角度,如果没有正确的成分,这可能非常困难。但是,ADA4571和AD22151简化了此测量。 LT1158通过减少PWM电路并消除计算死亡时间的需求,从而轻松使用直流电动刷的PWM驱动电路。 AD8418减轻了圆电流,而LTC2345可以轻松消化并同步多个模拟传感器的输出。这些组件只是电动机控制应用程序ADI投资组合的一小部分许可。 3。下载技术相关数据1。数据表https://share.eepw.com.cn/share/share/download/ID/3957522,用户手册https://share.eepw.com.cn/share/share/share/download/download/ID/3957533,应用程序注释https://share.eepw.com.cn/share/download/ID/395754Htps://share.eepw.com.cn/share/share/down load/ID/ID/3957554。技术文章https://www.analog.com/cn/resources/technical-articles/delivering-on-the------------------- lever-extension-promise.htmlhttps://www.analog.com/www.analog.com/c.com/cn/cn/cn/cn/resources/technical-article-technical-article-technical-articles/technical-articles/motor-motor-motor-crolle-crolle-crollejump,4.链接: //www.eepw.com.cn/event/action/adi_2025/index.html
1。简介ADA4571是一种各向异性磁磁倍率(AMR)传感器,其中包括信号调理放大器和ADC驱动器。 ADA4571生成两个模拟输出,指示周围磁场的角度位置。 ADA4571包括一个包装中的两个芯片,尤其是AMR传感器和固定增益(名义G = 40)仪器放大器。 ADA4571在旋转磁场的角度提供了清洁且增强的余弦输出信号和正弦。输出电压的范围与电源电压成正比。传感器以45°角包含两个小麦桥。 X-Y传感器平面上的旋转磁场提供了两个正弦输出的脱位信号,并且传感器的角度(α)频率和磁场的方向加倍。在X-Y平面的均匀磁场中,输出信号与Z方向的物理位置(气隙)无关。 ADA4571有8针SOIC包装。产品功能1。测量非接触角度的角度。 2。测量磁场的方向而不是农场的密度。 3。对气隙变化的敏感性非常小。 4。工作距离很长。 5。即使弱饱和场也具有很高的精度。 6。热漂移和生命漂移非常小。 7。滞后可能被忽略。 8。单芯片解决方案。 2。成本增加并增加了客户对小型产品(例如其他工程领域)的需求,成本迅速成为强迫弹药系统。为了有效地驱动和控制飞行中的这些弹药,由小型控制驱动系统(CAS)进行了较小的精度调整,以确定鳍的位置并调整到弹丸的气流。传统上,这些系统是由带有变速箱的拉丝直流电动机驱动或驱动的,但是现代前进的电动机驱动器在内R,便宜,更好的控制驱动系统。但是成本是增加系统的复杂性,因为无刷直流电动机的三个阶段是驱动的。增加复杂性的原因很多。首先,传统的拉丝直流电动机仅需要H桥,而没有直流电动机的那些则需要三个独立的MOSFET才能驱动相位。这增加了成本很小的成本,需要额外的PCB板空间。当将这些MOSFET驱动时,重要的是要小心避免同时打开顶部和底部MOSFET,否则通过短路电流可能会损坏MOSFET。应特别注意手腕宽度(PWM)的顶部和底部驱动器信号之间的死时间。从软件的角度来看,可以使用简单的PID循环来控制传统的拉丝电机,而刷子直流电动机需要更先进的循环和相位换向的方法 - 标准测量周期的电流 - 旋转电流,相电压,转子角度和速度。刷子直流电动机的结构无直流电动机的刷子是定子中的电磁体集合,并且在可旋转的转子上安装了永久磁铁。电动机可以是转子的内部电动机(磁铁在线圈内部不满)或外圈电动机(磁铁位于线圈外)。图1显示了转子电动机的刷子dcang和电动机上使用的外电动机转子。在这两种情况下,三相线(U,V,W或A,B,C)在定子牙齿周围缠绕。这些绕组被加强以吸引和排斥永久磁铁(红色/蓝色)。图1。内转子电动机和外转子电动机。标准微处理器或DSP的当前驾驶强度不足以直接直接驱动线圈,因此,由MOSFET组成的电源逆变器阶段通常用于将PWM驱动电流从控制接口转换为需要高电压电流的电动机。通常,三相逆变器使用六个N通道MOSFET(请参见图2的顶部)来形成图2所示的开关状态。在图:001、010、011和101。1中没有显示许多移动状态。如图3所示,在状态空间的表示中,这些状态被刺穿。通过剃须和开关,施加到旋转的六个扇区可以达到2/3×VDC。作为这种方法的自然扩展,可以将PWM应用于每对MOSFET。通过更改PWM占空比周期的循环,根据PWM生成系统的分辨率,圆形转基上产生的电压可以产生大量的电压。图2。三相逆变器和开关状态。图3。表示向状态空间及其在PSECTOR I和部门VI中的分布。在没有PWM的情况下,一种非常自然的换向方法就是简单地刺激每对绕组或六步的换向)。在这种方法中,获得一个或两个阶段的高度,其余旋转驱动较低。通过随后启用相位,在每个阶段都会拉动转子磁体,转子开始旋转。为了确定激发的相位,通常将三个霍尔效应传感器安装在定子上,三个60度与电角分开。该大厅效应的传感器检测每个转子磁体并制作一个3位数的顺序,用于确定下一个换向区域。尽管这种方法适用于低电动机控制系统,但它受扭矩脉动tolow速度的影响。此外,如果电动机用于定位/伺服应用,则这种扭矩脉动会导致噪声并导致位置误差。 1正弦相的工作原理是在没有直流电动刷上的定子通量与当前的定子对齐。无刷直流电动机基于当前的梯形运动。这些波浪不同by彼此之间的120°相。永久磁铁同步电动机(PMSM)与没有直流电动刷的磁体同步电动机相似,但需要正弦电流驱动器。图4显示了永久磁铁重合电动机的功能框图。通过使用速度传感器或基于位置轴传感器和电动机参数的估算值来实现简单的速度控制。 Moviewave驱动器在低速下特别有效,但在高速下分开,因为所需的电影波的功率频率也应以速度增加。在较高的速度下,电动机需要增加扭矩,这将滞后到当前阶段。 2要正确控制更高速度,通常必须引入相位导线以正确对齐扭矩和磁通量。图4。磁同步电动机的Yongsine驱动器。为了克服这个问题,可以使用更先进的控制方案称为磁场方向控制(FOC)。与其他换向技术一样,基于ES旋转产生的后电气电动力的安静位置和速度,无需使用传感器即可实现磁场方向控制,并且也可以使用传感器溶液实现位置和电流MGA传感器。控制磁场方向的控制基础是控制进入旋转电动机的扭矩和通量矢量。形成的向量来自所需的运动速度。利用电动机的电气和机械常数(惯性矩,摩擦系数,电感和定子电阻来控制摩托车,必须将这些数量转换为转子参考(图6)以在公园内发生变化,以生成Vα和Vβ。将Vα和Vβ转换为PWM值转换为PWM值转换为PWM值,将pWM值转换为pWM的磁场控制,图6个位置控制。参数。如图3所示,可以形成速度矢量。相邻细胞向量之间的空间已被抓住,以在1到6之间产生对应于换向循环行业的六个扇区的扇区。图7显示了图3中第一个扇区的近距离图7显示,可以通过使用两个相邻的细胞向量(V1和V2)找到VREF,并在每个状态停留一定时间(对应于占空比)。可以使用类似的矢量数学方法(派生方程)来计算此占空比(见图8)。图7。状态空间的扇区1。 u,v,w矢量方程计算图8。根据图7中的方程式从参考矢量的扇区时间,认为归一化时间为1.0(相当于整个100%值班周期),并减少TN和TN + 1,您可以得到PWM时间。该扇区可以通过其他计算确定,如图9所示。图9。该扇区的测定。计算占空比并发送到PWM'时可以使用磁场方向实现S PWM模块,开环控制。应包括反馈以实现闭环控制。如图4所示,使用公园的相对公园对三个圆周循环的电流进行测量和修改。为了测量这些波,可以使用许多不同的技术:平行于每个相旋转的分流检测;三个MOSFET和土壤的Ilalim之间的低端分流;每个地面MOSFET下的相位分流;或每个领先MOSFET和VDC之间的高压边缘。如果设计仅限于成本,则与绕组并行使用两个分流是一个很好的方法,因为这是一种直接测量两个绕组电流的简便方法。可以计算出第三电流用于Kielang Current Hough定律,该定律是整体是0。另一个好处是可以随时测量电流,而不是启用底部或顶部MOSFET。测量这些波之后,它们必须是使用分流系统的最大电流在[-1,+1]中归一化。对于发现的位置和速度,可以使用编码器(相对或完全),可以使用霍尔效应传感器,旋转器或磁角传感器。根据传感器的分辨率,可能需要其他位置和估计速度。无论使用哪种技术,测得的角度都必须转换为电位角度,以便相位换向与实际转子位置同步,并实现转子变化。角速度也应是已知的,但是该术语通常位于机械域中以匹配所需的输入速度。如果已知转子的实际位置和速度,则可以执行反向/反向公园和CLARKE变换,以将相位电流从固定的定子坐标系转换为旋转坐标系转换为d,q参考系统。对于生成的电流和误差速度tERMS,PI循环会生成错误向量,然后将其馈回Pagesthe Park,Clarke将会改变,并且可以反复进行控制过程。那么该过程应该重复多快呢?答案根据电动机的特性而不同。通常,选择听觉可听见范围(15 kHz至30 kHz)以外的PWM频率,以使电动机不会在人耳中释放可听到的共振。然后在中断的PWM工作中实现磁场方向控制和所需的控制回路,以便可以将新的PWM值用于下一个PWM循环。它对在现场控制的例程中施加了严格的正时限制,因为在伺服PWM中断上花费的任何时间都不用于伺服控制处理器的其他方面(例如PC程序串行接口)。在30 kHz的PWM频率下,每个PWM ISR仅为33.3 μs。可以看出,每个微秒的智慧都很重要!应该注意的是,电影的计算开销余弦和其他浮点计算应减少。通常,最好将现场控制方向定向定向在PWM ISR时间的50%以下,以便处理器可以交付其他外围设备(例如UART),以处理诸如更改所需速度或设置新位置之类的较少重要任务。选定的组件规定,控制取向控制本身的实现本身是复杂的,仔细选择组件可以帮助减少额外的系统集成挑战。 ADI提供了各种用于电机控制信号链的设备。这些组件包括栅极驱动器,全角和霍尔效应传感器,电流传感器和分离产品。 ANG在图10中显示了链链链组件的简单功能框图。在高水平下,使用ADA4571 AMR角度传感器和AD22151磁场传感器,无需刷刷直流电动机轴的位置和速度。相绕组电流测量USINg内联排出电阻,AD8418当前定义放大器卸下PWM标准电压模式。 LTC2345-18 8×18位ADC将6个模拟电压从传感器转移到微控制器数字电压。微控制器使用这些信号来计算PWM占空比并将其发送到硬件计时器。 LT1158 MOSFET驾驶员充当了六个电源逆变器MOSFET的门驾驶员。图10。链链信号链的功能框图。 LT1158是N渠道MOSFET的一体式半身驱动器。尽管电源电压范围为5至30 V DC,但PWM波形逻辑输入可以适应TTL或CMOS水平。此外,单个PWM输入被转换为高和低MOSFET驱动信号,芯片自动结合了死者的自适应时间。这意味着PWM频率可能会严格地改变 - 无需输入,以保护MOSFET免受当前破坏而无需更改PWM计时器代码或重新计算戒指。图11。LT1158双N通道MOSFET驱动器。 ADA4571集成的各向异性磁扰(AMR)传感器可以测量180°并测量0.5°之内的精度。传感器的电源电压为2.7 V至5 V,当启用温度补偿时,电力消耗仅为7 mA。传感器的输出是正弦波(VSIN,VCO)的两个类似物,以2.5 V(5 V电源)为中心。在VSIN和VCO的电压被二定化之后,它们可以通过简单公式将其转换为角度:图12。ADA4571AMR传感器。为了测量360°的完整旋转,ADA4571可以与线性输出磁场(HALL效应)传感器(例如AD22151)一起使用。 AD22151专为单个5V操作电源而设计,其输出电压与垂直于包装的磁场的线性比例。在正常操作期间,该设备的最大强度为10 mA,可以发现双极或单极磁场不同的收益。该传感器的优点可以在模拟输出电压上看到,并且很容易添加到已经具有模拟测量功能的系统中,例如当前传感器输出或其他模拟角度传感器。将AD22151与AOF ADA4571一起垂直放置,并可以通过软件组合输出,以检测360°轴轴仪的磁铁直径。像一个角度传感器一样,使用传感器的磁场方向控制需要通过无直接运动刷来测量相电流的准确相位。 AD8418是双向零饮用电流放大器,非常适合此任务。在整个温度范围内工作时,该外电流放大器的益处为20 v/v,并且标准范围为-2 V至+70V。放大器还可以通过分流器看到双向电流,当测量刷子DC电动机的相位电流时,这特别有用。该设备具有设计的VS电源电压范围2.7 V至5 V,以模拟输出电压为中心在VS/2上。如果选择了5 V电源,则输出为2.5 V,与ADA4571相同。图13。AD8418电流传感器。使用模拟输出传感器时,应将结果转换为数字域。尽管有许多ADC,但由于8个同时采样通道,LTC2345特别适合运动控制。采样将其转换为同步,并带有单个上升的边缘到转换线。然后,在中心对齐PWM期间,可以同时同步传感器传感器的相电流和全角。单个5V电源简化了电源设计,并且仍然不到20mA。数字逻辑输出的独立电压为LTC2345接口提供了较低的电压微控制器,处理器或FPGA。由于模拟输入范围是NAPCAN适应,因此可以使用(IN-)模拟INP自动从硬件中删除2.5 V偏移位置和电流传感器UT频道。根据所需的采样吞吐量,可以使用SDO输出以不同的时钟速率从LTC2345输出数据。图14。LTC2345功能框图。结论刷摩托车在控制驱动系统上的普及需要更高级的算法,传感器和驱动电路才能支撑。正弦和磁场控制是两种相位换向技术,可以在没有直流电动机的情况下准确控制刷子。两种技术都需要精确测量刷直流电动机的转子角度,如果没有正确的成分,这可能非常困难。但是,ADA4571和AD22151简化了此测量。 LT1158通过减少PWM电路并消除计算死亡时间的需求,从而轻松使用直流电动刷的PWM驱动电路。 AD8418减轻了圆电流,而LTC2345可以轻松消化并同步多个模拟传感器的输出。这些组件只是电动机控制应用程序ADI投资组合的一小部分许可。 3。下载技术相关数据1。数据表https://share.eepw.com.cn/share/share/download/ID/3957522,用户手册https://share.eepw.com.cn/share/share/share/download/download/ID/3957533,应用程序注释https://share.eepw.com.cn/share/download/ID/395754Htps://share.eepw.com.cn/share/share/down load/ID/ID/3957554。技术文章https://www.analog.com/cn/resources/technical-articles/delivering-on-the------------------- lever-extension-promise.htmlhttps://www.analog.com/www.analog.com/c.com/cn/cn/cn/cn/resources/technical-article-technical-article-technical-articles/technical-articles/motor-motor-motor-crolle-crolle-crollejump,4.链接: //www.eepw.com.cn/event/action/adi_2025/index.html



